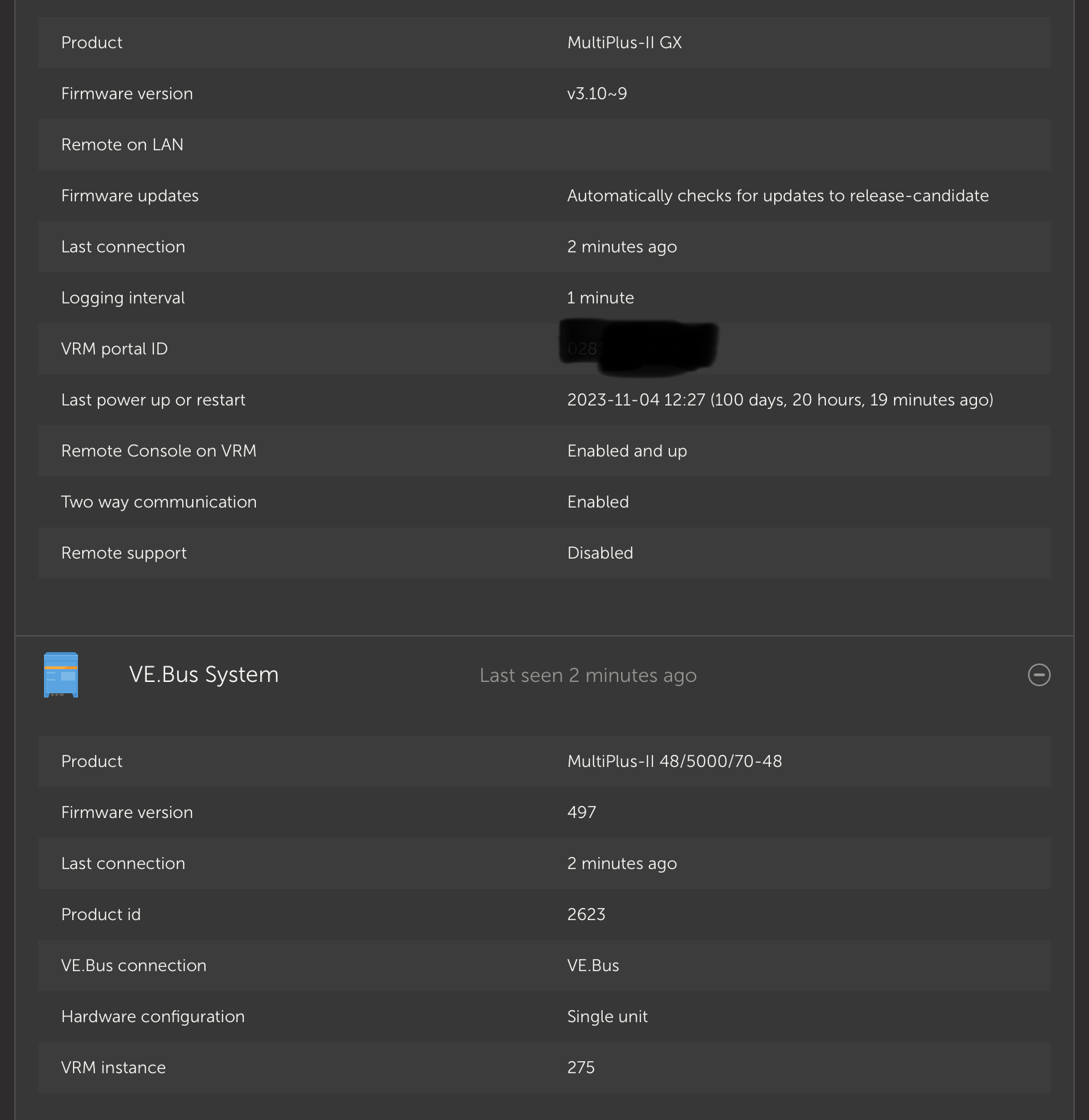
I tried to build up two systems consisting of:
- Multiplus II GX
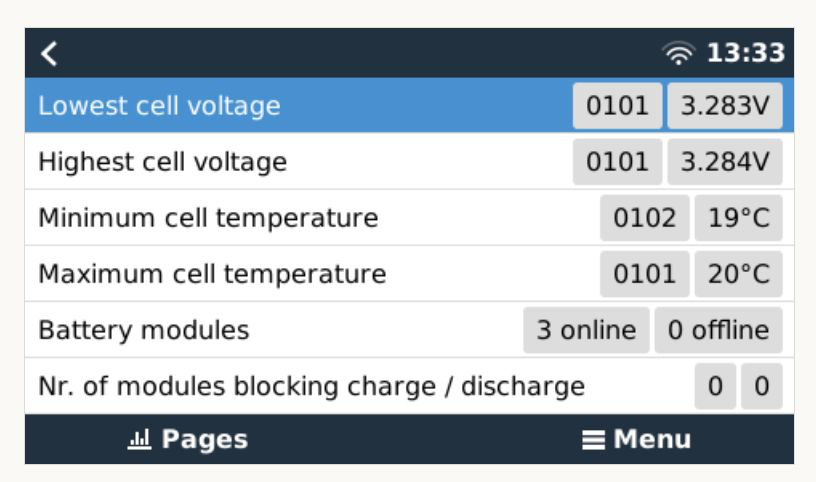
- Pylontech Force L2 (stack consists of 3x Battery module + 1x BMS)
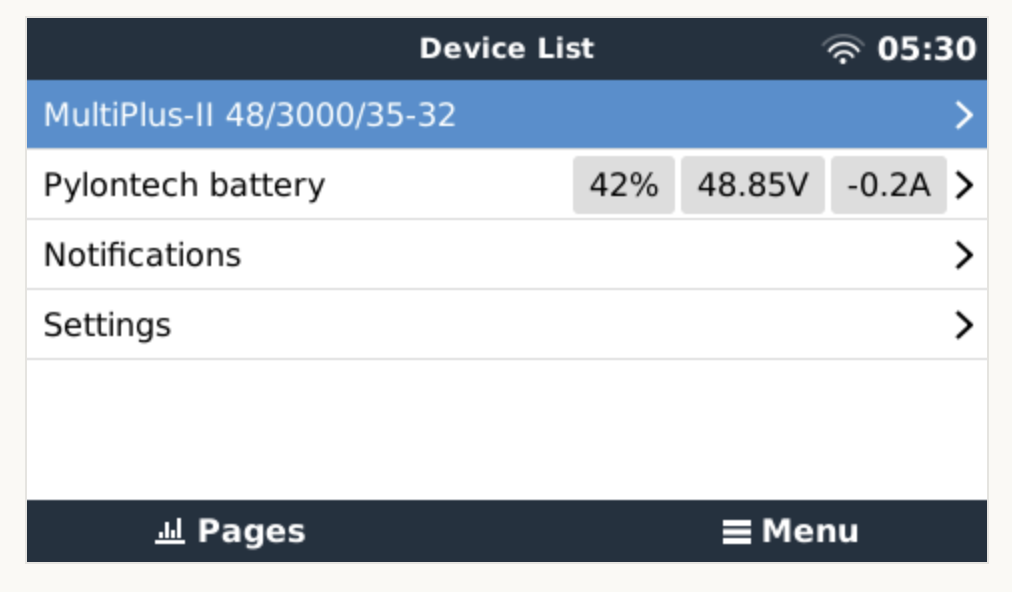
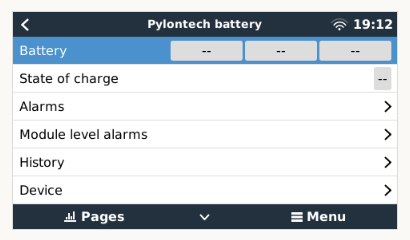
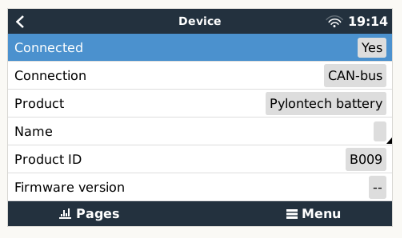
I expected it to be "Plug & Play" but actually I'm now stuck for two days because I don't receive any detail data from the battery. The Multiplus recognizes a Pylontech battery but that's it. No SoC, no module level data.
However, when I unplug the CAN cable it's immediately reflected in the Remote Console. Plugging it back in brings the battery back.
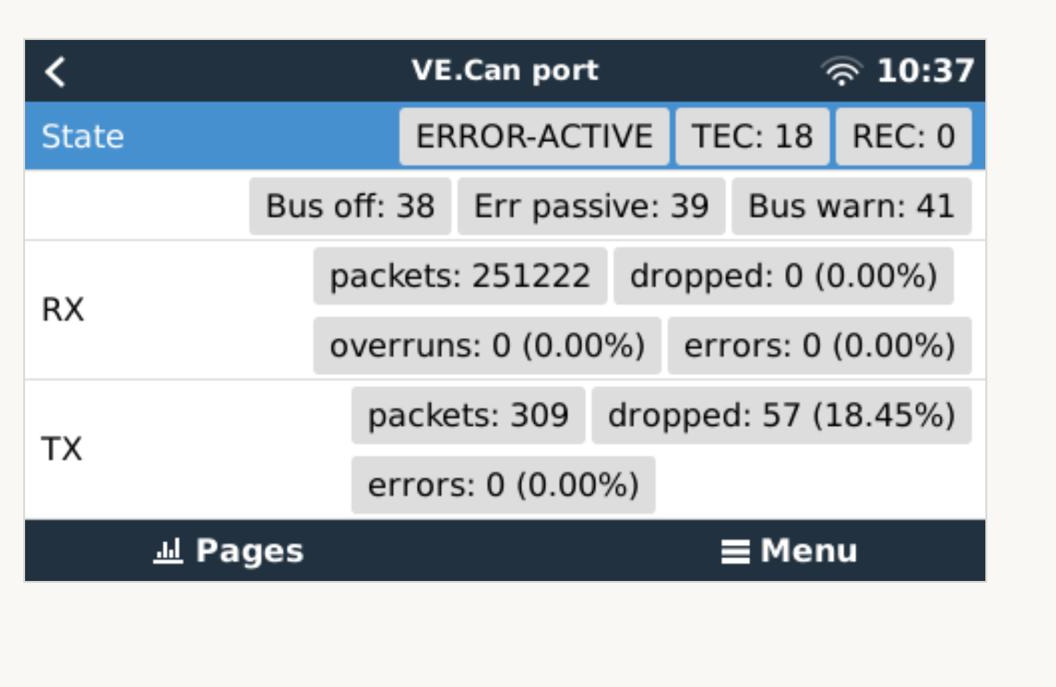
It can be observed that it's very likely that it's a CAN or protocol error, as the status page suggests:
What I've done and tried so far:
- Updated the GX and Multiplus to the latest firmware (v3.13).
- Changed VE CAN to CAN-bus BMS (500 kbit/s).
- Changing the termination resistor (even leaving it unplugged).
- Following Victron's and Pylontech's manuals rigorously (here and here), paying special attention to pin mappings on both sides.
- Made 3 different cables ("Type A"), each with or without a second CAN termination resistor.
- Started the Multiplus first, or the Pylontech Force L2 first.
- Waited for long times between boots.
The manufacturing date of the Pylontech Force L2 is Feb 2023, having installed firmware MW3_15_B505_1.27. Maybe it's a firmware problem on Pylontech side? I don't have access to a newer firmware.
My interpretation of the CAN port screenshot above with the partially lost TX data packets is that the Pylontech BMS is responding to most, but not all, of Victron's data requests. Therefore it could be a software problem on the Victron side or on the Pylontech side.
I saw similar posts in this forum dating a year back, but without a suggestion on how to solve this.
Any ideas, or someone who could fix this in the past?
 @xzv I also sent an email to Pylontech support and await feedback. I noticed your other efforts and just wondered whether you tried both GX ports and checked the actual pins are ok?
@xzv I also sent an email to Pylontech support and await feedback. I noticed your other efforts and just wondered whether you tried both GX ports and checked the actual pins are ok?