For a some days i've been trying to get this to work but can't seem to figure it out.
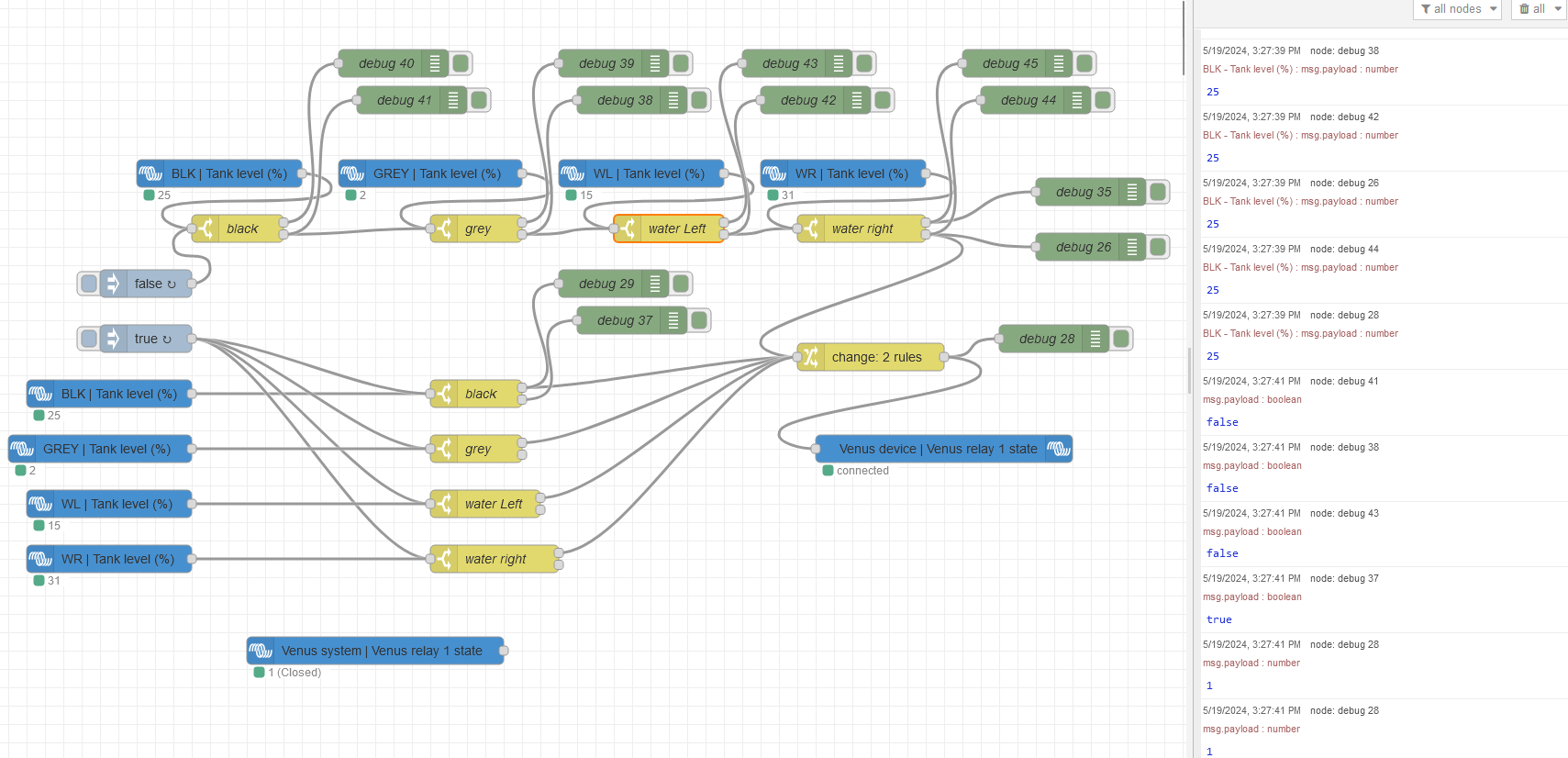
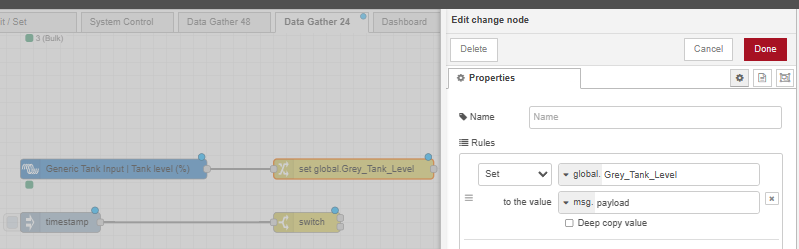
The Cerbo gx has 4 tanksensor input. In this project I'm using all 4 inputs, input 1 black water, input 2 grey water, input 3 freshwater left, input 4 freshwater right.
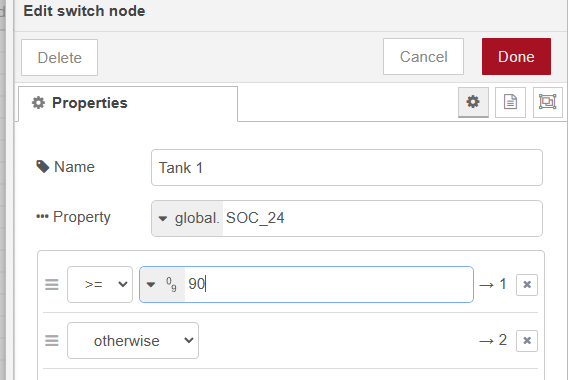
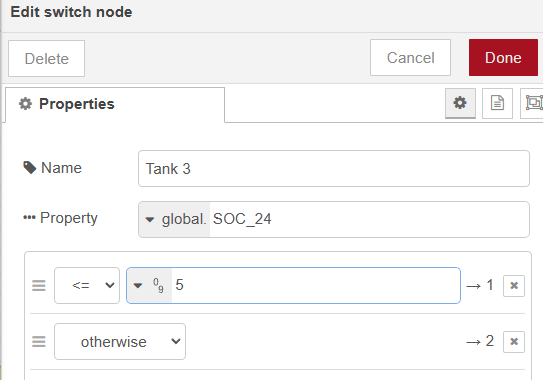
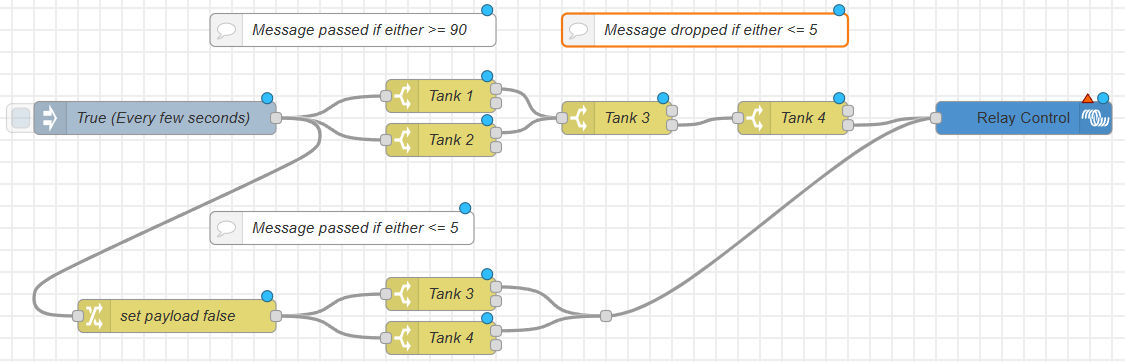
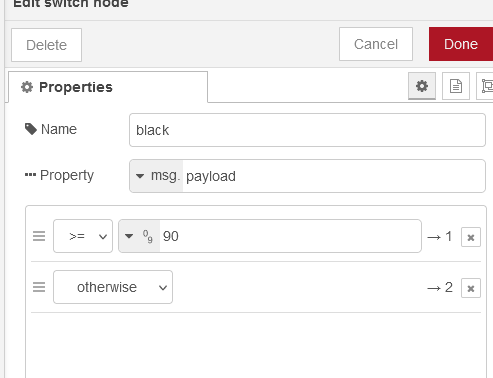
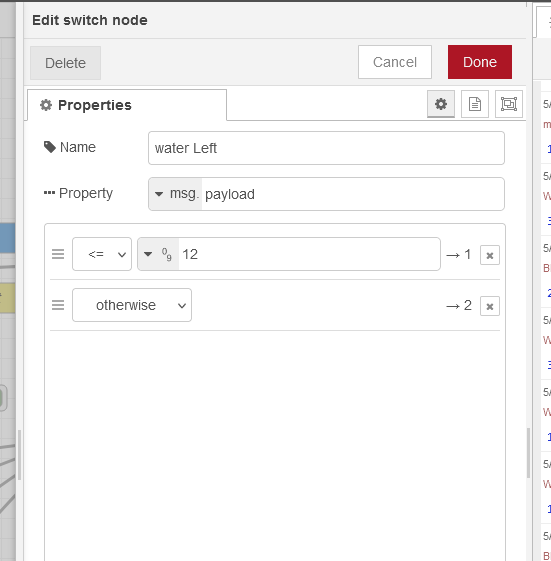
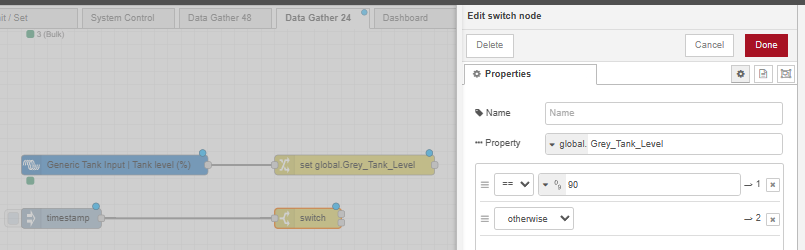
When one or both of the waste water tanks reach 90% or more I want to switch the cerbo relay 1 on. When one or both of the freshwater tanks reach 5% or less I want to switch the cerbo relay 1 on. So the waterpump doesn't overfill the tanks or is running dry.
When all of the tanksensor are within the limits, waste water 0-90% and freshwater 5-100%, the relay should be off and the pump should be able to run.
Right now i'm trying to get it working with some of the "And" en "Or" gates but for some reason they don't seem to work like on a Siemens Logo!. I've tried setting different topics, tried booleans and payload messages, for some reason the relay only want to turn ether on or off or still turn on or off when an other tanksensor pushes his information.
When I started this I thought it wouldn't be this difficult, but it feels like I'm running in circle now. I'm not really in to Javascript and so, I've worked with Siemens Logo! and so.
Does anyone have a idea how to get a flow like this working?
 I will send you some code shortly... But its worth sticking with it to get your head around how Node Red works.
I will send you some code shortly... But its worth sticking with it to get your head around how Node Red works.