I ran through a strange GPS issue while installing the CERBO on my boat. I used the VE.CAN cable to interconnect with the NMEA 2000 network. On the NMEA2000 network there is a Furuno GP33 GPS which is a low power device and is the basic GPS of the boat when chart plotters and RADAR are off. When chart plotter (Furuno Navnet) are on, there is a 10 hz rapid update GPS coming on to support map with radar overlay and autopilot.
Upon connecting the VE.CAN i saw immediately the NMEA 2000 data coming but no position. Ok i found out the GP33 doesn't supply a 129025 PGN. No problem i picked up another GPS which is a USB BU353 and voila i got two GPS connected to the CERBO but only the BU353 give position.
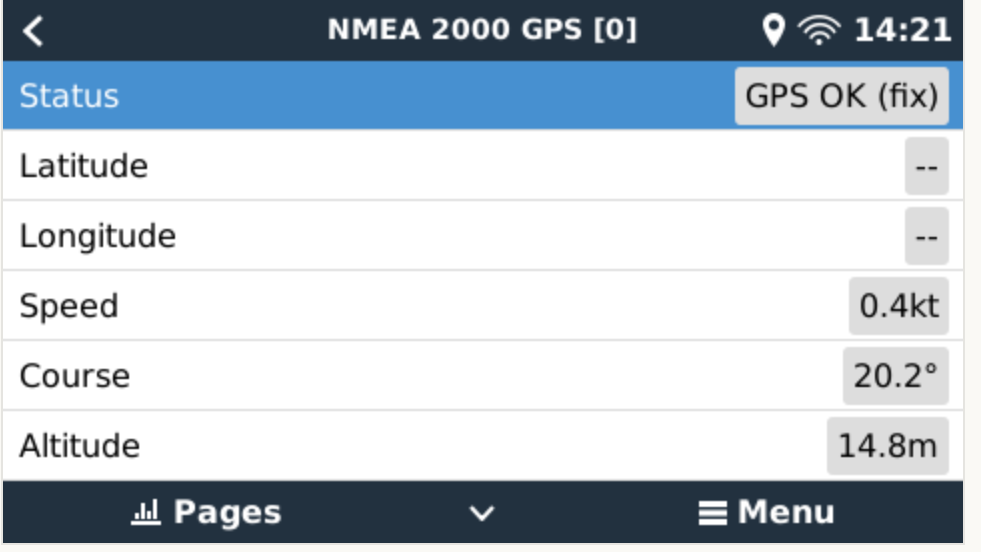
Now in the VRM things are different. I have done several test and concluded that CERBO prioritize the information of the NMEA2000 GPS and not the USB. When both GPS are connected, no position is sent to VRM. If only the BU353 is connected, VRM receive position and geofence work. If only the NMEA2000 GPS is connected then no position in VRM.
I don't mind feeding the CERBO with the USB GPS but i'm losing all the integration with NMEA 2000 by disconnecting the VE.CAN cable. The GP33 is an old device (as is the BU353 by the way) and Furuno won't modify it to support 129025. I wonder if there is a way to "prioritize" the position information that is arriving on the CERBO when multiple GPS are connected ? If one position is blank in a GPS feed and the other is not blank, then use the non-blank.
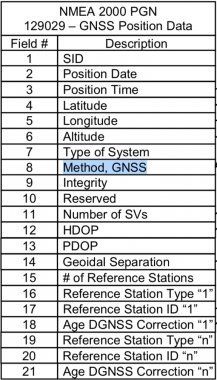
Or would it be possible for Cerbo to support the PGN 129029 which is another way of getting a position. The 129025 is a rapid update which is not required on the Cerbo, we are not displaying map and radar in real time here...
This would enable GPS failover scenario as well.
thanks for any advice on this situation.