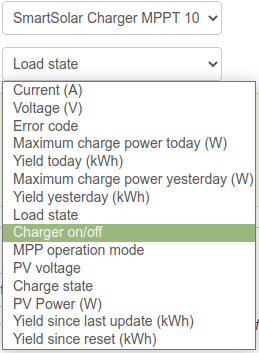
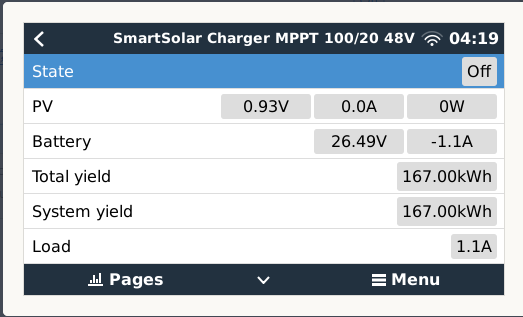
I have just updated my 'operational' system from OS v2.80 to V2.92 and Load Current is no longer available in the list of available values in the Victron Node. It is however still present in the VRM displays and Victron Connect
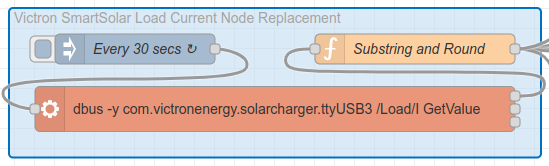
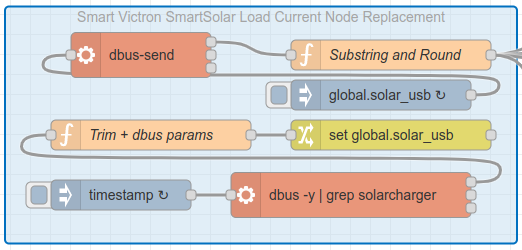
Has anybody else experienced this problem and are there any suggestions on how to get the Load Current data into Node-RED? So far I have checked with dbus-spy and it does not seem to be present on the dbus either.