I hooked up the VE.Can to NMEA 2000 cable between my Cerbo and my boat's bridged N2K-STNG network - and cross-over devices immediately appeared on both systems - but I'm having trouble configuring them on the Victron side.
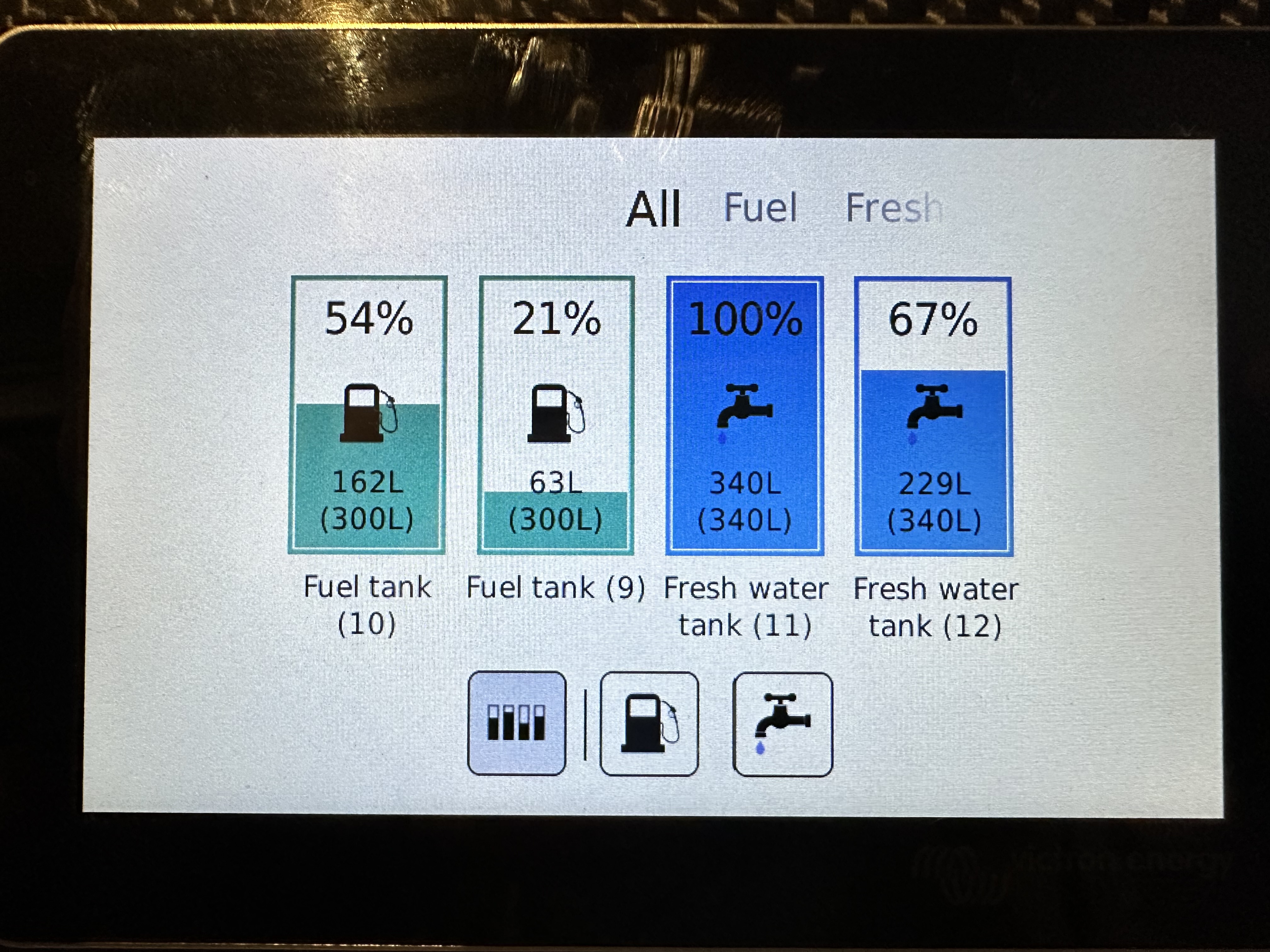
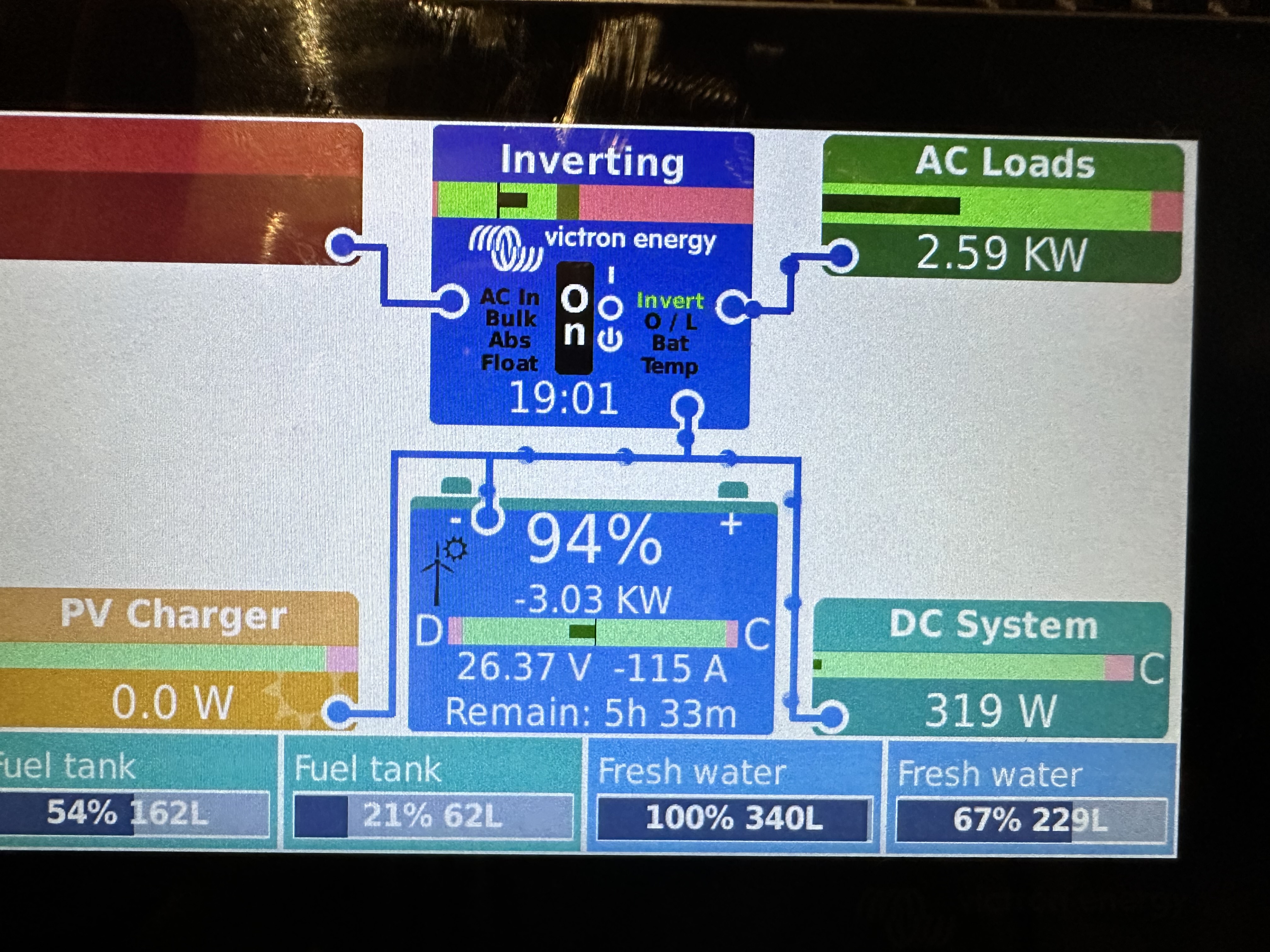
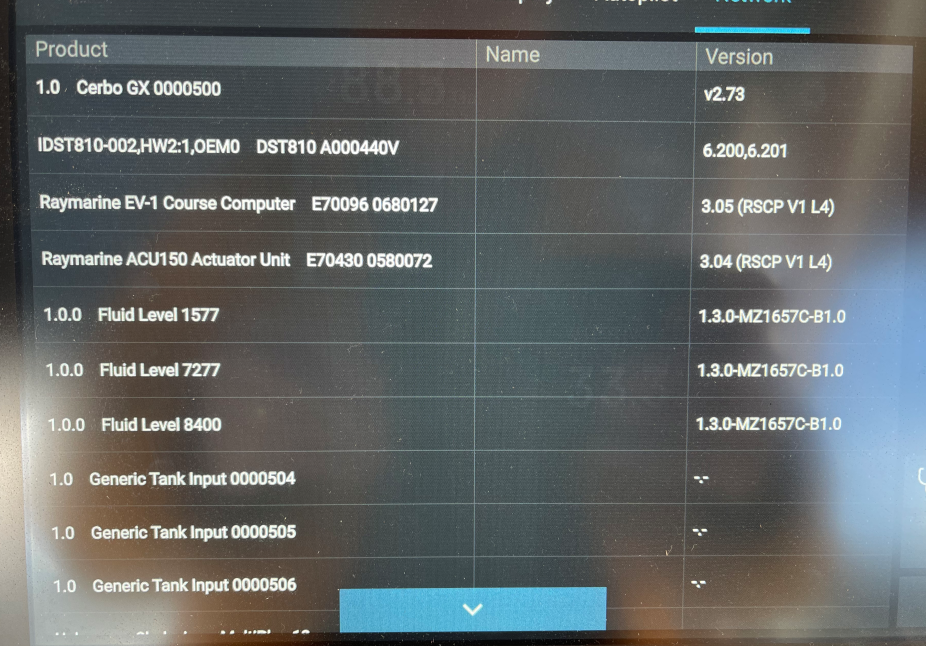
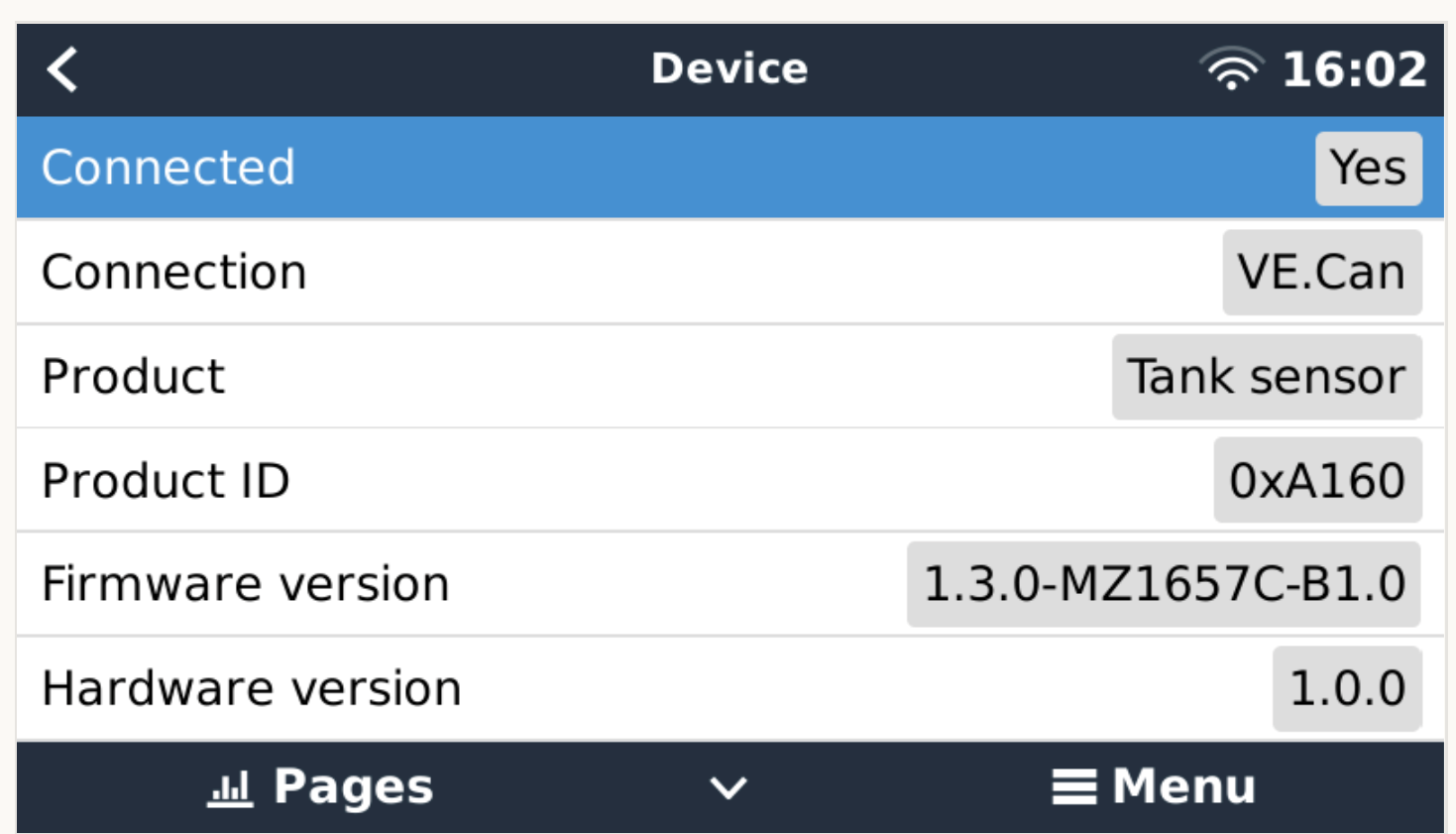
I'll start with the incoming (to Victron) tank devices - they immediately showed up on VRM:
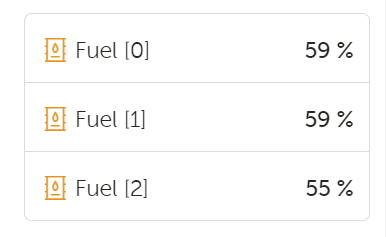
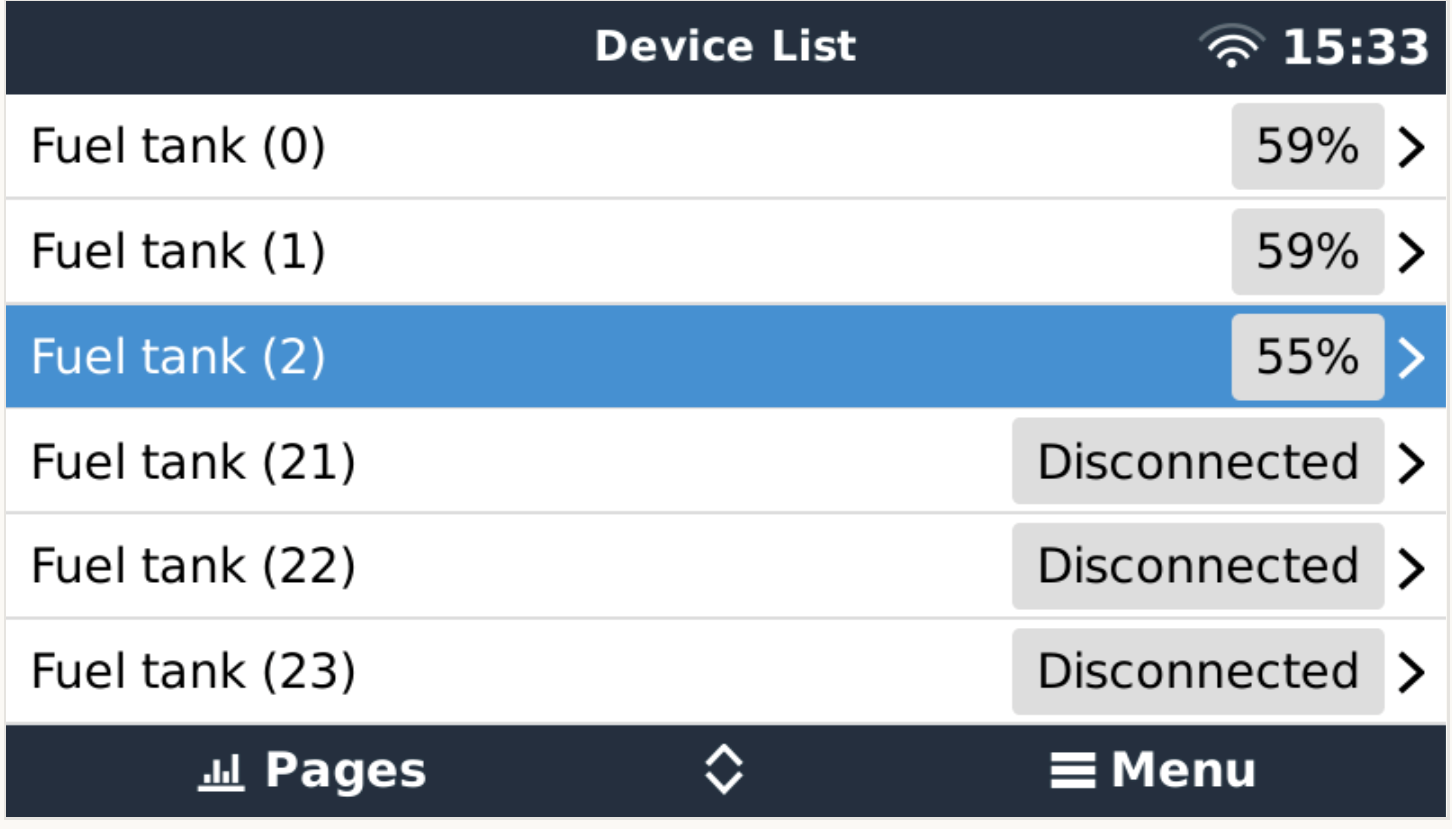
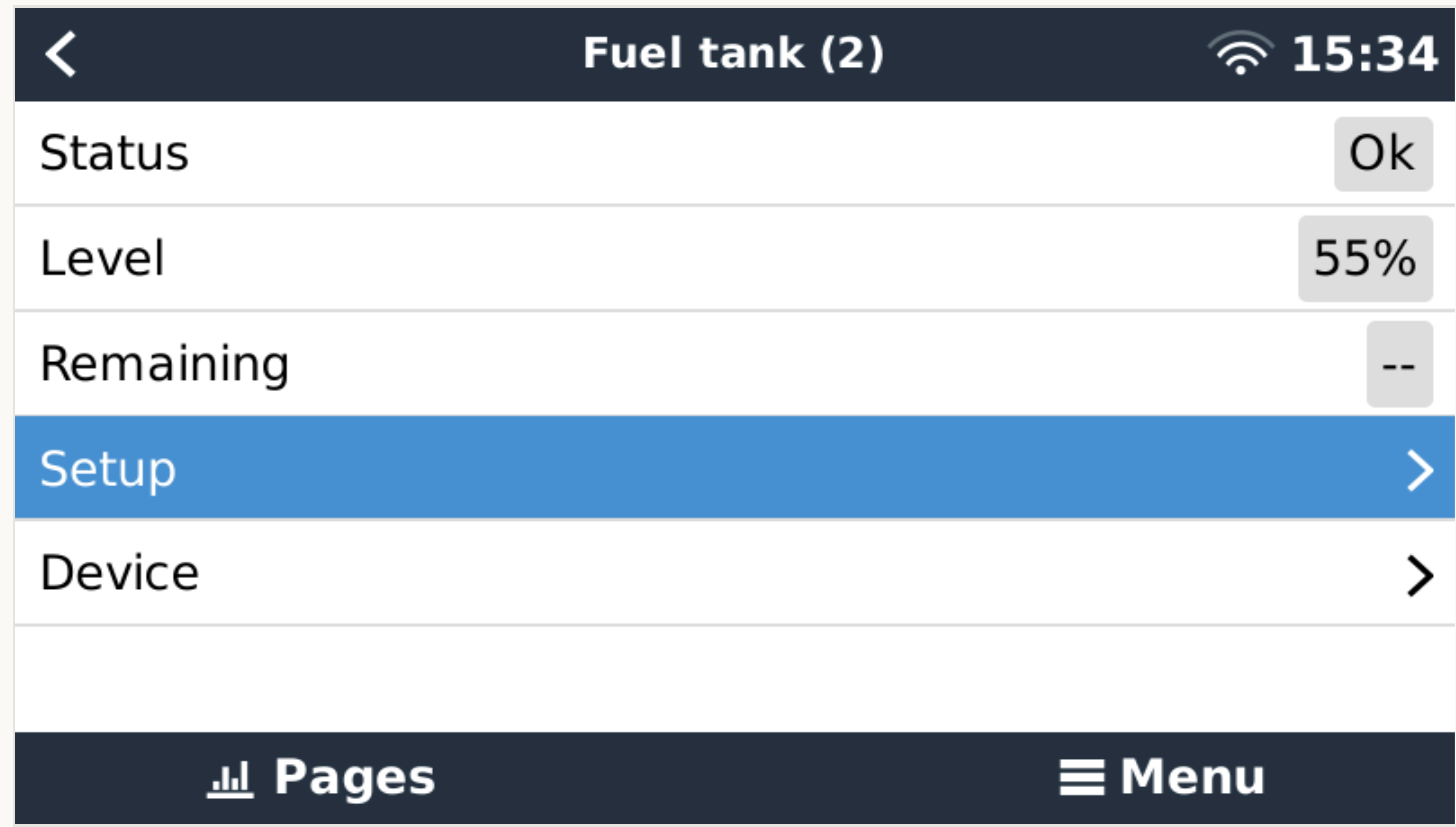
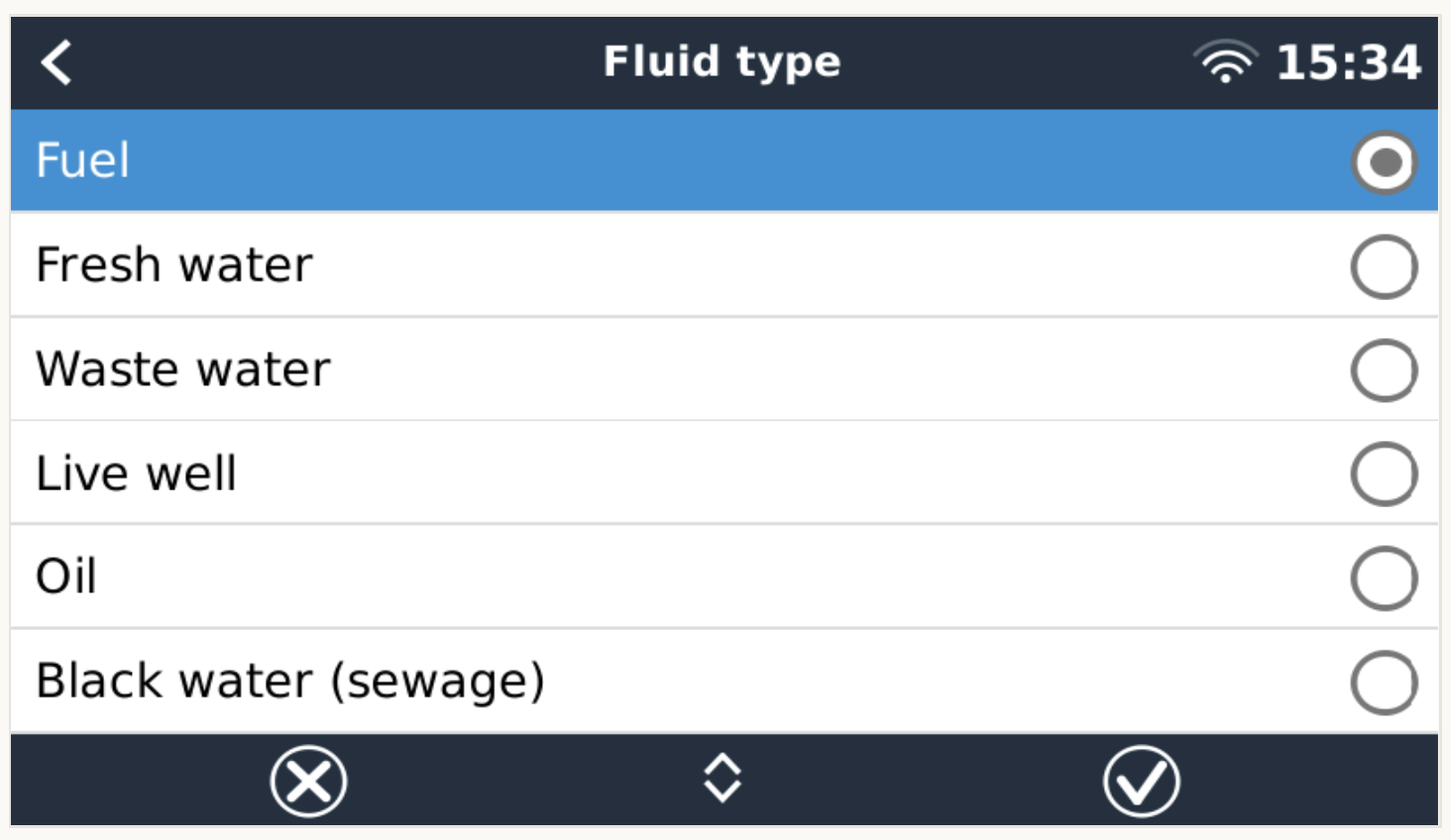
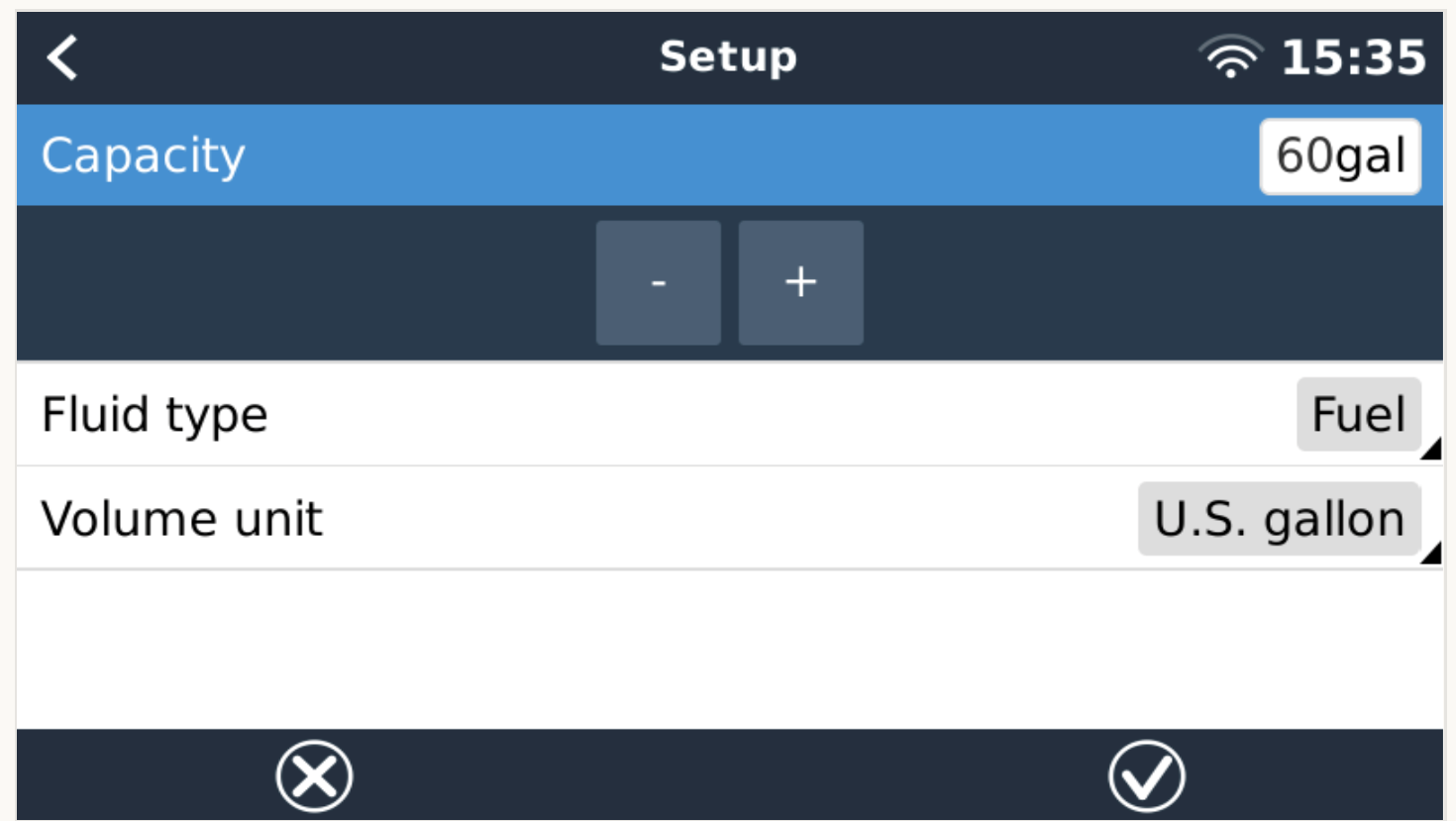
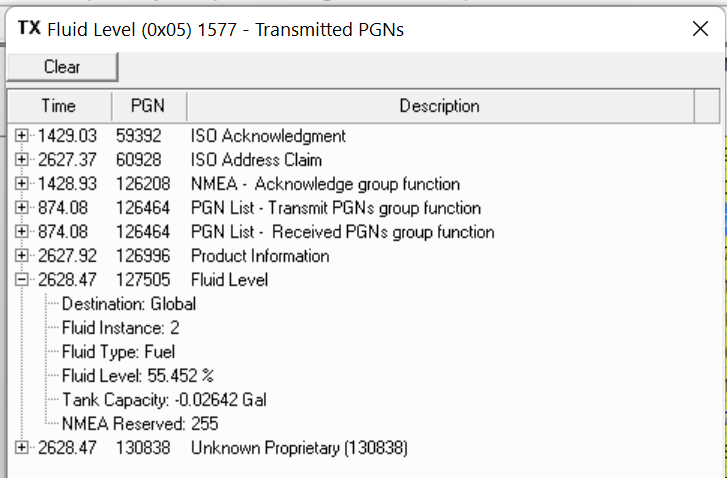
And when I look in Devices on the Cerbo, they are there - but I am unable to change the parameters. Fuel (2) above is actually Water - when I try to change the type in the Cerbo UX it doesn't take the change and immediately goes back to the device configuration screen. I am able to change the capacity type to gallons and that persists, but if I try to change the capacity (in this case to 60 gallons) and hit the checkmark...it does NOT persist. I also looked at possibly changing the device IDs of the Cerbo pre-defined tanks but they are read only. This isn't the end of the world but it's bugging me and I'd like to get the configurations correct. How can I change the configuration?
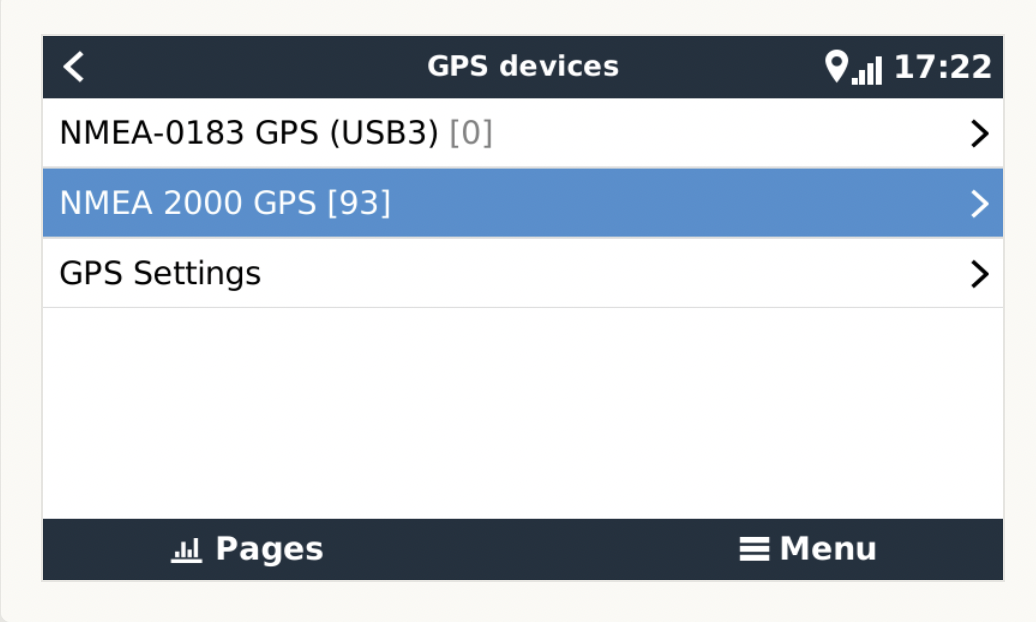
On the Victron N2K outbound...I cannot find a way to get the Devices that the documentation shows. Section 11.3 starts with a UI shot and zero context about how that screen was accessed:
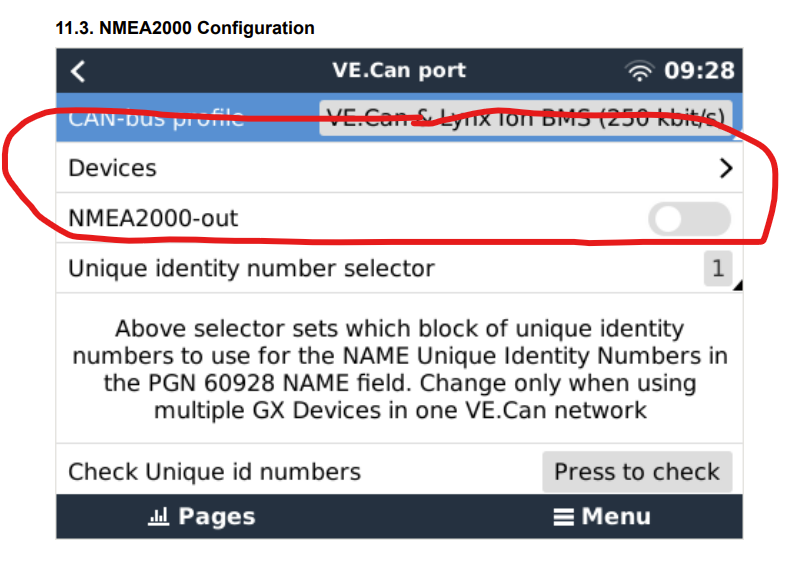
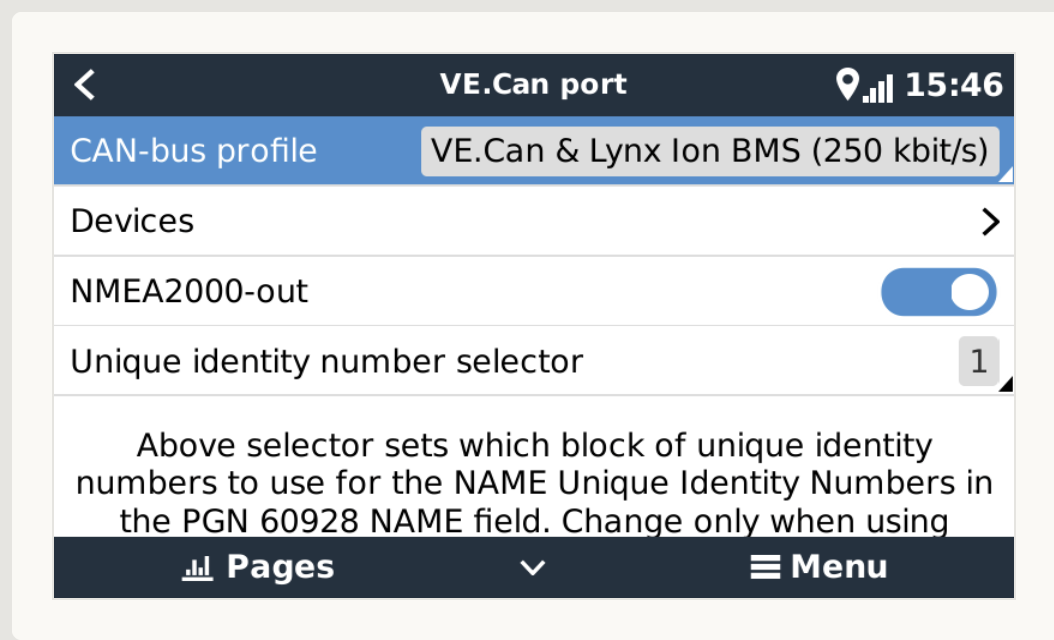
My screen (whether I use the Lynx or CAN-Bus profile) is different - it doesn't have "Devices"
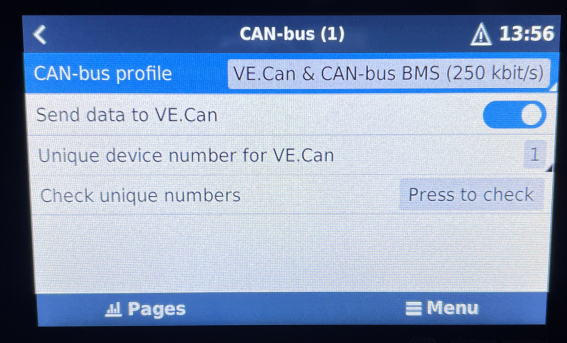
The Cerbo manual points to this blog post, which has the same screen as I have:
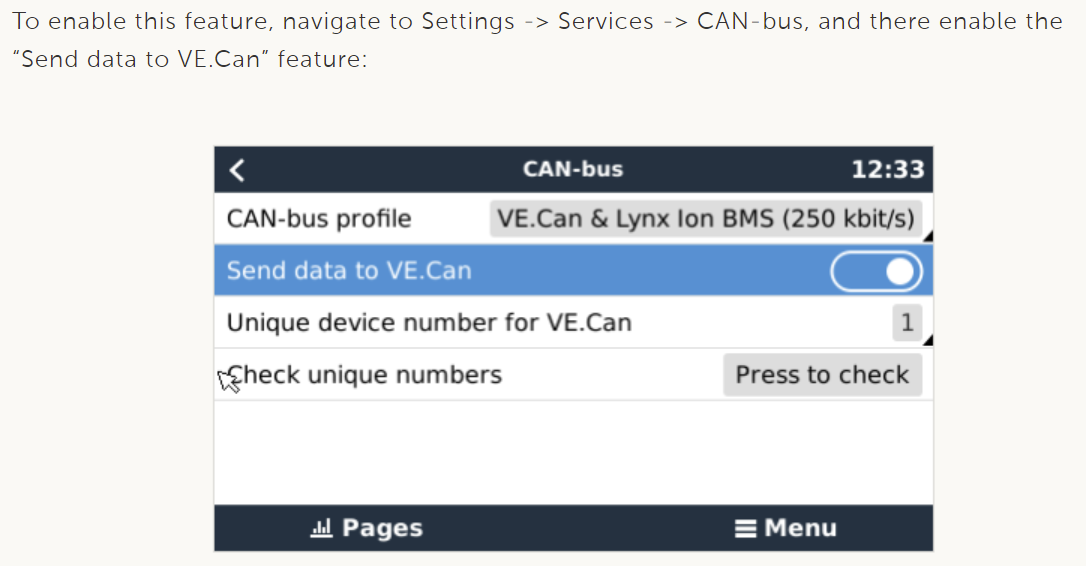
....and says "In the coming days we’ll be updating the Marine NMEA 2000 and MFD integration documentation; taking out the now deprecated interfaces as well as adding the earlier released MFD App Integration."
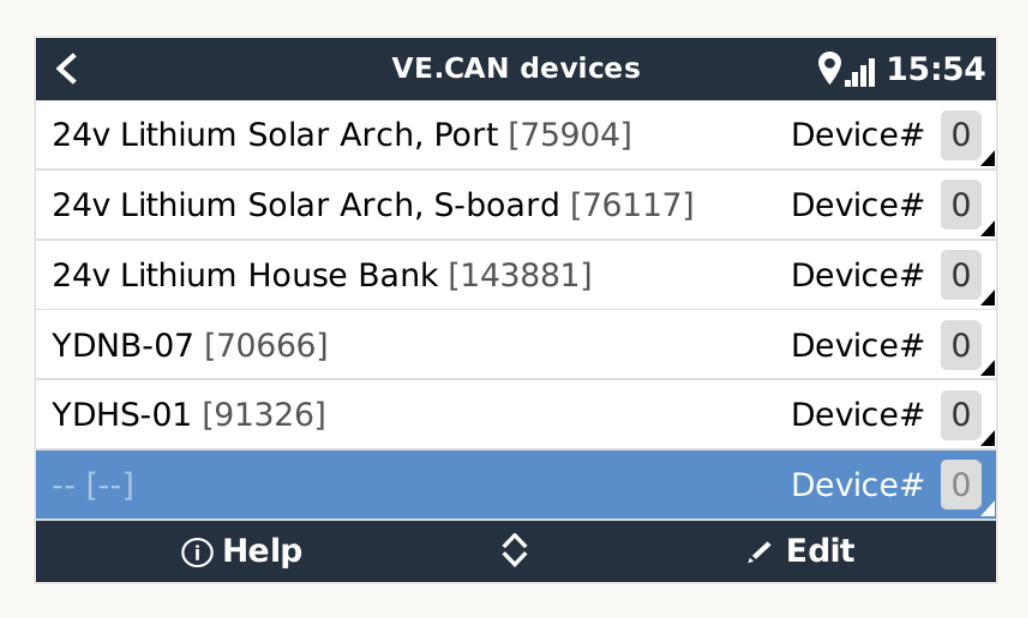
So...reading this now at home...I'm thinking that my UX is "correct" and the Cerbo manual did NOT get updated with the current UX. And that the "Devices" isn't to configure just the devices on that interface, but is a redirection to the Devices submenu on Setup.
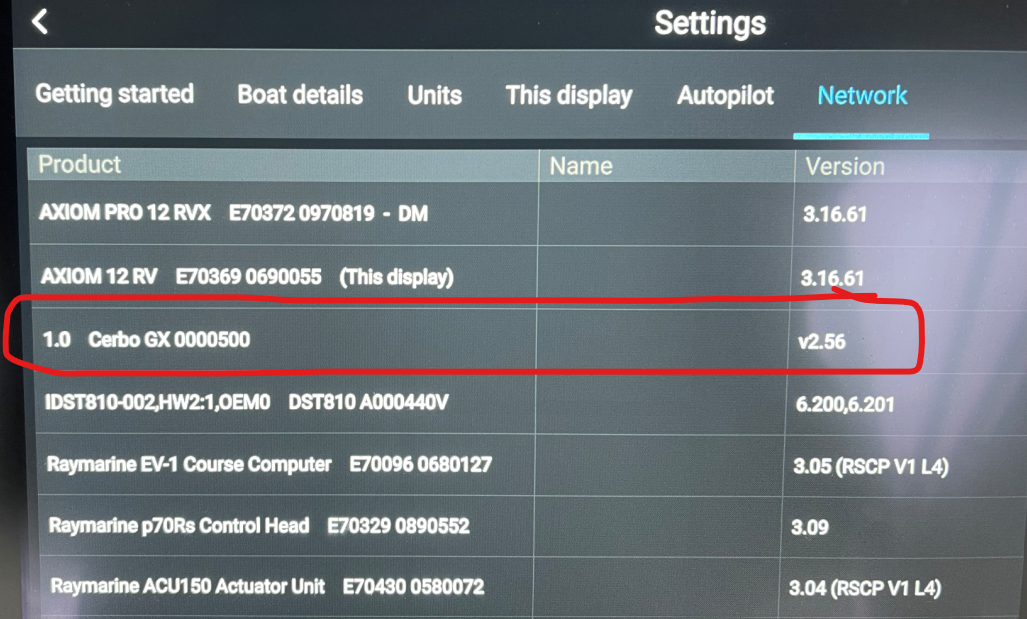
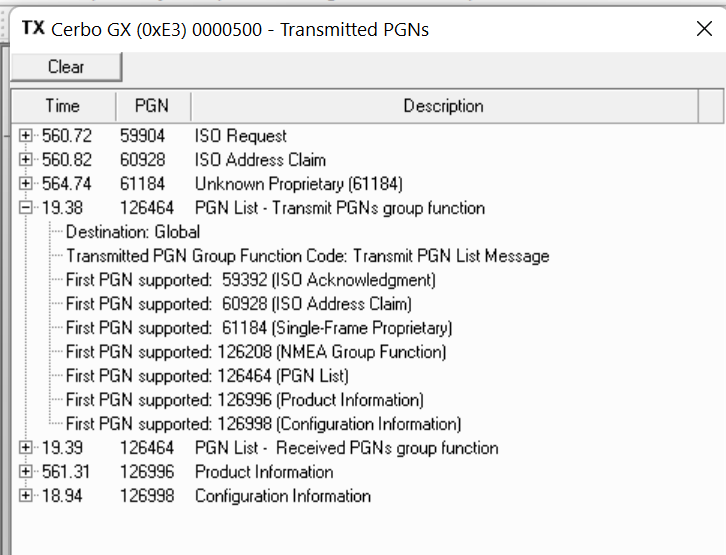
My Victron devices are showing up on my Raymarine network - the Cerbo looks reasonable:
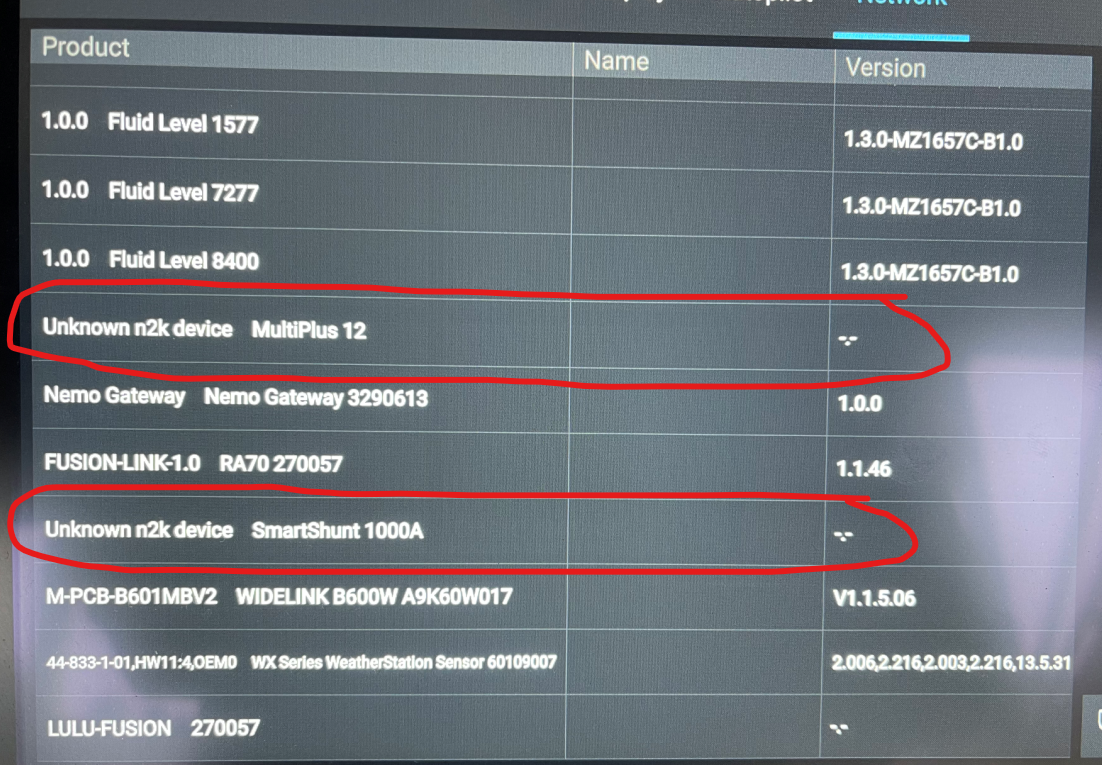
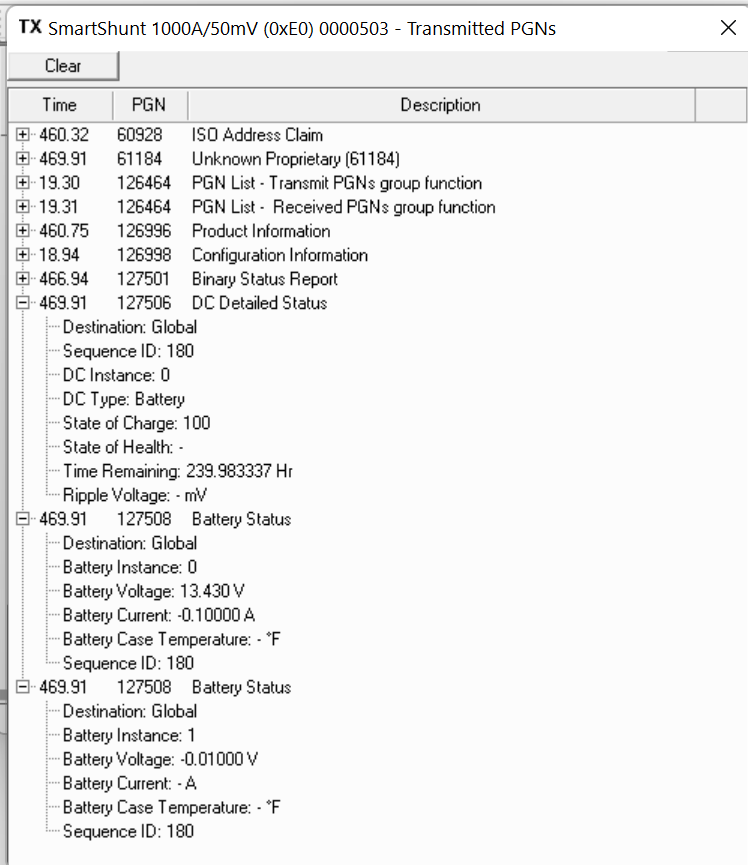
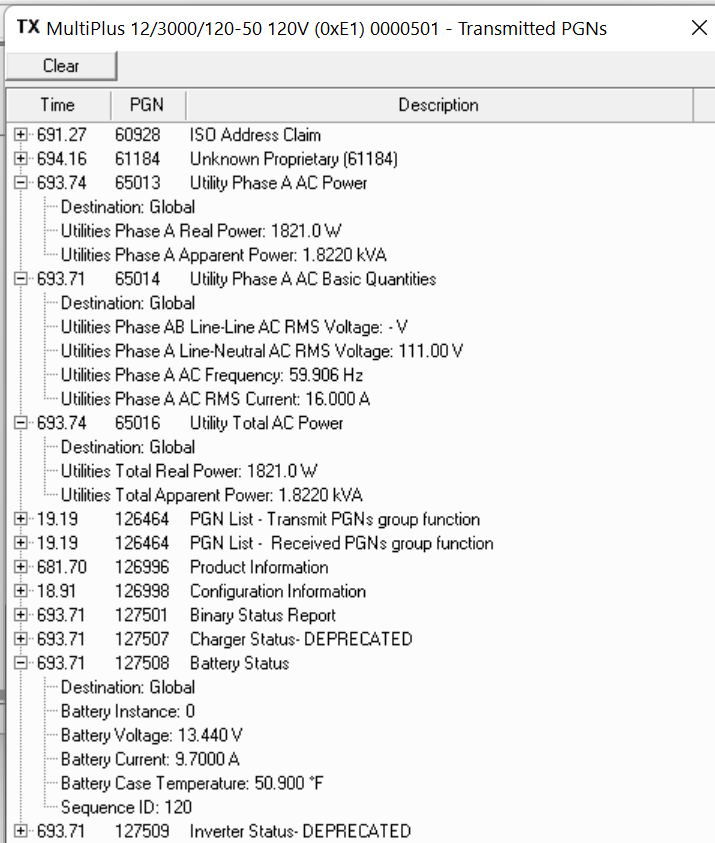
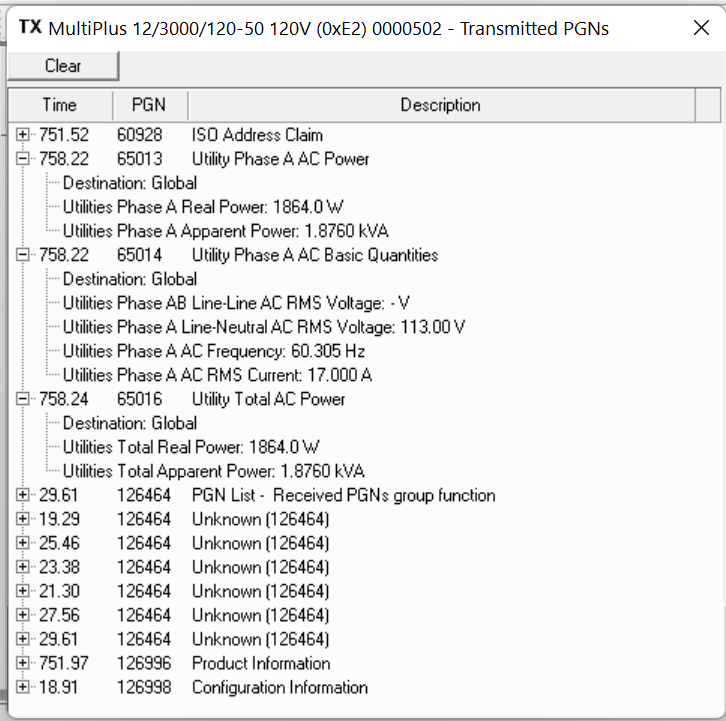
But the MultiPlus and the SmartShunt need configuring:
I'll try to get to my boat today to verify, but has anyone been able to configure Victron-based N2K devices successfully?

{kind=link}