I would like to use the multi rs solar with a pylontech us5000 battery, without using a gx device. Is it possible? How to connect the two? Do I need other connection other that the obvious + and - cables?
The installation is off-grid, so nothing on the AC-in side.
No, you will need a GX device in order to interpret the BMS data, and whilst it is possible to use the US5000b without the BMS connected to the incerter/charger device, its is STRONGLY not recommended, as if the US5000 is over or under charged (by cell voltage, not overall voltage) it can turn off and leave the output open.
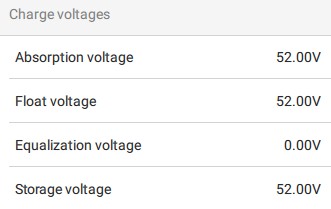
I’ve used the Multi RS with Pylontech as you said, for a period of time, configuring charge voltages as below.
Not always the SOC will be properly computed by Multi RS, but it will work.
The Pylontech need at least 52.2V to charge to 100%, but the 52V is for allowing a small room for high cell voltages on the final stage of charging. Anyway, the Pylontech will throw a high voltage warning only at 3.6V per cell.
I will investigate the matter further and then decide how to proceed.
The reason I would like to avoid using a GX device is to keep the system as simple as possible. I also do not require all the remote controls and data logs the GX seems to provide.
@stok47 without the bms comms to a cerbo, do I need to connect the battery to the multi RS solar (via a CANbus tybe B cable to the VE.CAN ports)?
You dont need to use that, the cerbo can be without internet connection. Also VRM is a nice thing, but its not a requirement.
I also recommend to use a GX device, does not necessarely need to be a Cerbo, due to the BMS. Its also nice to use the local network connection to configure things (granted, those things dont need config if they dont exist)
There wont be any communication between BMS and Inverter. At the very minimum you should use the “Contact” connector on the Pylontechs, which provides ATC/ATD signals, then use those to control the inverter
If you require any form of accurate SOC you would want to install a shunt/BMV, while that is a less expensive option, spending a bit extra for a Pi or appropriate Cerbo would be a better choice and will provide better protection for your battery, which ultimately is the most expensive part.
The logging provides a history, insight into cell imbalances etc, something that helps with any support or warranty request, should one be required in the future.
So, sure you can omit these parts and charge it old-school, but imo you’re losing more than you’re gaining.
Seeing that you all pretty much advice against an installation without gx, I have resolved to buy one. After all it is only a few hundred € more, and not worth messing with that in the big picture.
I am looking forward to be up and running as soon as possible.,
I have received all the components I need for this system, I am now confused on how to wire them together! Please help!!
I have a VE Can to Can bus BMS type A cable between the Cerbo GX VE Can 1 (left) and the Pylontech battery A/Can port, and a 568B cable between the Cerbo GX VE Can 1 (right) and the VE Can port on the Multi RS Solar. The second VE Can port on the Multi RS Solar has a terminator:
hi no, you will have to wire them to a separate can port (1 or 2) on the cerbo and set the one with the pylontech connect to bms can and that also needs a terminator, setting is explained in victron pylontech manual
so pylon on ve can 1 (with canbus bms setting) and rs on ve can 2
In your picture you have connected both Multi RS and Pylontech to the same VE.Can port. But they both talk different language and use a different port speed.
You need the Cerbo GX as a translator between your Multi RS and Pylontech so that they can understand each other.
You have two VE.Can ports on the Cerbo GX Mk2.
Connect the Multi RS to one port and terminate both ends.
Connect the BMS cable from the Pylontech to the other port and terminate it. The Pylontech has an internal terminator so you only need to terminate the side on the Cerbo GX Mk2.
In the Cerbo GX you configure what CAN-bus profile you want.
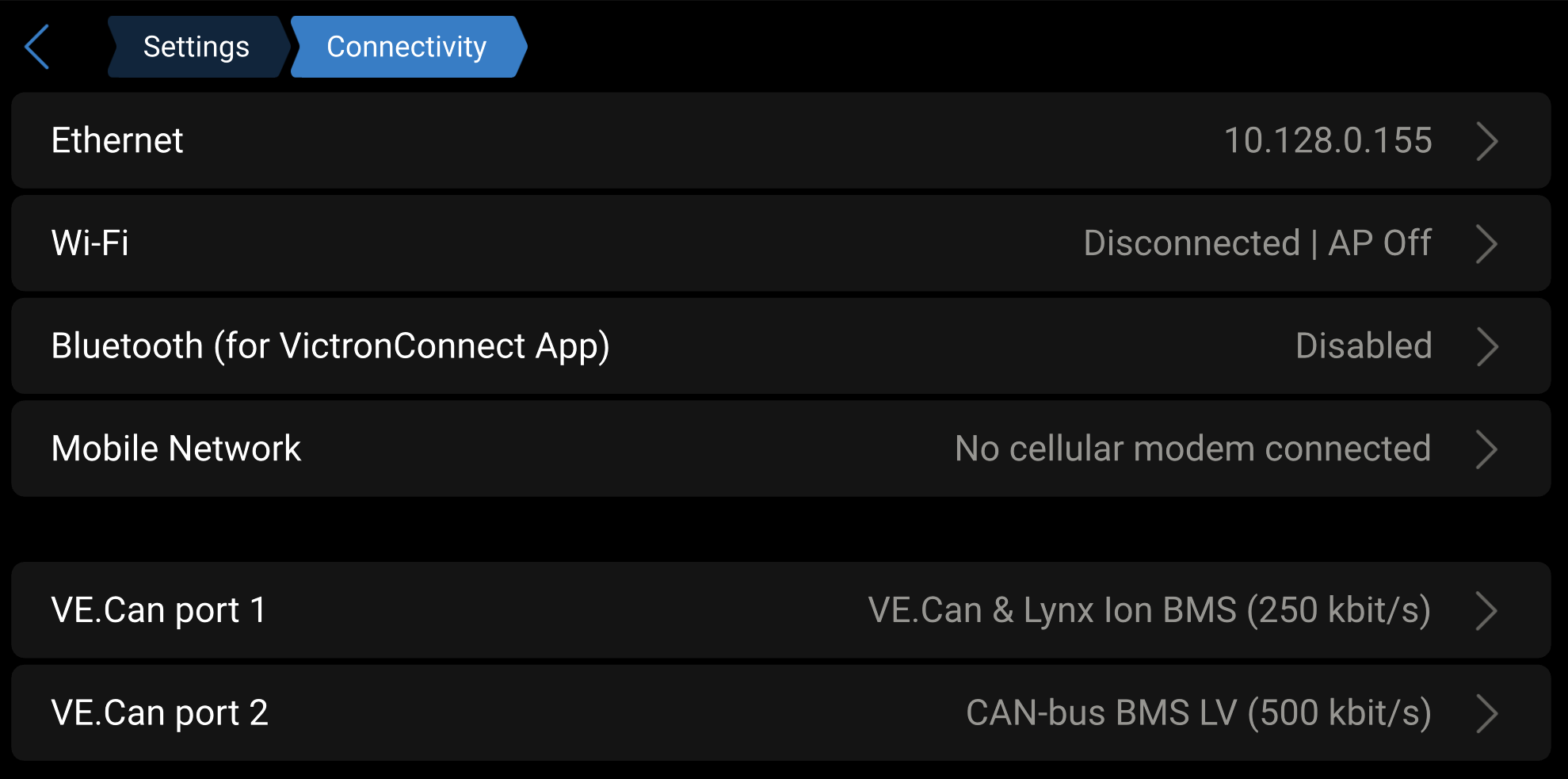
Configure the port connected to the Multi RS as VE.Can & Lynx ION BMS (250 kbit/s).
Configure the port connected to the Pylontech as CAN-bus BMS LV (500 kbit/s)