That’s in fact the problem, not easy to get stable speed sometime.
I’ve done some tests also for the saving the track (roadtrip) but to improve and to process more tests. (I was with a regular van, citroen jumper on the highway driving around 110Km/h)
With in few months I will test with the RV Truck (70-80 km/h max) and around 15 to 50 offroad.
Collecting engine information is the most difficult… I’ve start with an old BBB with the Venus firmware, but I guess in my case I need to change it to something else…
I found that kind of manufacturer that could perhaps be somehow compliant with the CAN and ACE Automate… https://www.aceautomation.eu and DSE https://www.deepseaelectronics.com/ for the Genset…
The VE.CAN port on the cerbo is also used for NMEA2000. At the moment we dont know much about the boat interface, nothing has been announced on here about it yet. We have only used it via node red. Havent found anywhere you can select what parameters are displayed or where. If it has the data it shows it.
I would look to see if you can send any data via modbus tcp or other method to node red.
Thanks for your prompt, I now have a virtual motor in Node-RED that gets an engine rpm measurement from the Wakespeed WS500 alternator regulator and have the diesel.engine rpm showing. Motor power shows alternator power.
Still think it should pick up engine rpm if that is available.
Neither of Matthias’s first two suggestions will work in my case, the motor controller is already installed, and surely a SmartShunt can only read current?
The Sevcon motor controller sends out status data on the CANbus using the CANopen protocol/standard, this should be able to physically connect to the VE.CAN port on the Cerbo and be electrically and data-rate compatible as far as the messages are concerned. The question then is how to read this data in via node red and into the virtual motordrive node – does anyone know if this is possible, and how this would be configured?
Sorry, maybe I wasn’t clear – I realise the Smartshunt can also measure battery voltage and therefore power. However unlike the controller it can’t read rpm, and other controller/motor parameters. It also means physically inserting it into the high-current (500A?) supply to the motor, which may be “challenging” – I’ll have a look at the electrical layout this weekend when I go up to the boat.
And all this only helps if the “boat” page can display motor power (read from the Smartshunt) as the main central parameter in the display, which means the software has to allow free selection of this parameter – does anyone know if that’s the case?
Will codesys run on the Cerbo along with Node-RED, or is a separate RPi needed?
Thanks Matthijs. So can Smartshunt power be selected as the “central parameter” on the boat page display? And same question if the node-RED virtual motordrive is used – and how about rpm in this case?
How do you choose what is “added to the mix”? I have a GPS dongle plugged into the Cerbo so this has speed/location data available, but I certainly don’t want this to take priority over motor power – or rpm, if that can be “added to the mix” using Node-RED…
It should be simple to make the boat display configurable, even if only selecting what the big central reading is, so I’m surprised Victron haven’t done this.
Such configurability is really a necessity for it be be actually useful in real life. For example the GPS on my boat is only ever used for location tracking (including geofencing) not speed, so I need it to be visible to the Cerbo for that purpose – but certainly don’t want speed to be the central feature of the boat display, I simply don’t care about it, where I really do care about power consumption since this is fundamental for an electric boat.
Even if this feature isn’t on the initial release of the “boat display” feature, it should certainly be a high priority for the next one…
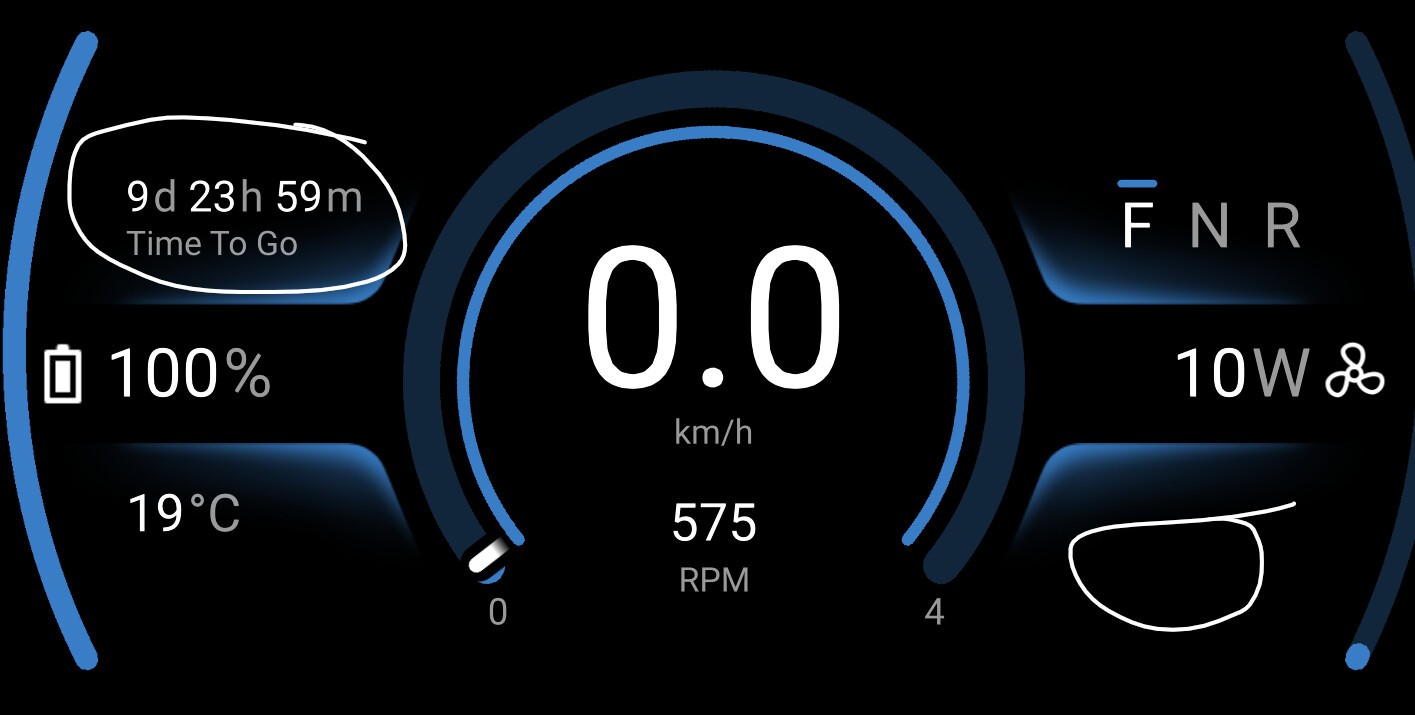
In my case the Time to Go is flikering… and sometime not coming up…
Remain the left bottom field to discover…
When I was talking, previously to see with some others devices like the ACE automation, The principle/goal is t be able to simulate the motordrive device and see if it is possible to get my truck parameter instead with the according registers… Some kind of fake motor drive…