I apologize if I missed something already posted, but I’m trying to connect an N2K SeeLevel Tank monitor to a CCGX.
I am a bit confused as to what I physically need to facilitate this connection.
I have no other N2K “network” or system in place, and only have the CCGX and the SeeLevel (N2K enabled) controller head.
Is there a cable I can buy (or pinouts for a cable I can make myself) to connect these devices directly to each other?
There was a reference made by @mvader (Victron Energy)
https://community.victronenergy.com/questions/6170/rv-c-can-bus-tank-monitors.html
as follows:
For clarity, the “Victron N2K adapter to which @ben refers is just a plug converter goes from micro-c n2k style to RJ-45 Victron VE.Can style.
No electrical components or software in there.
Your help is greatly appreciated
Thanks
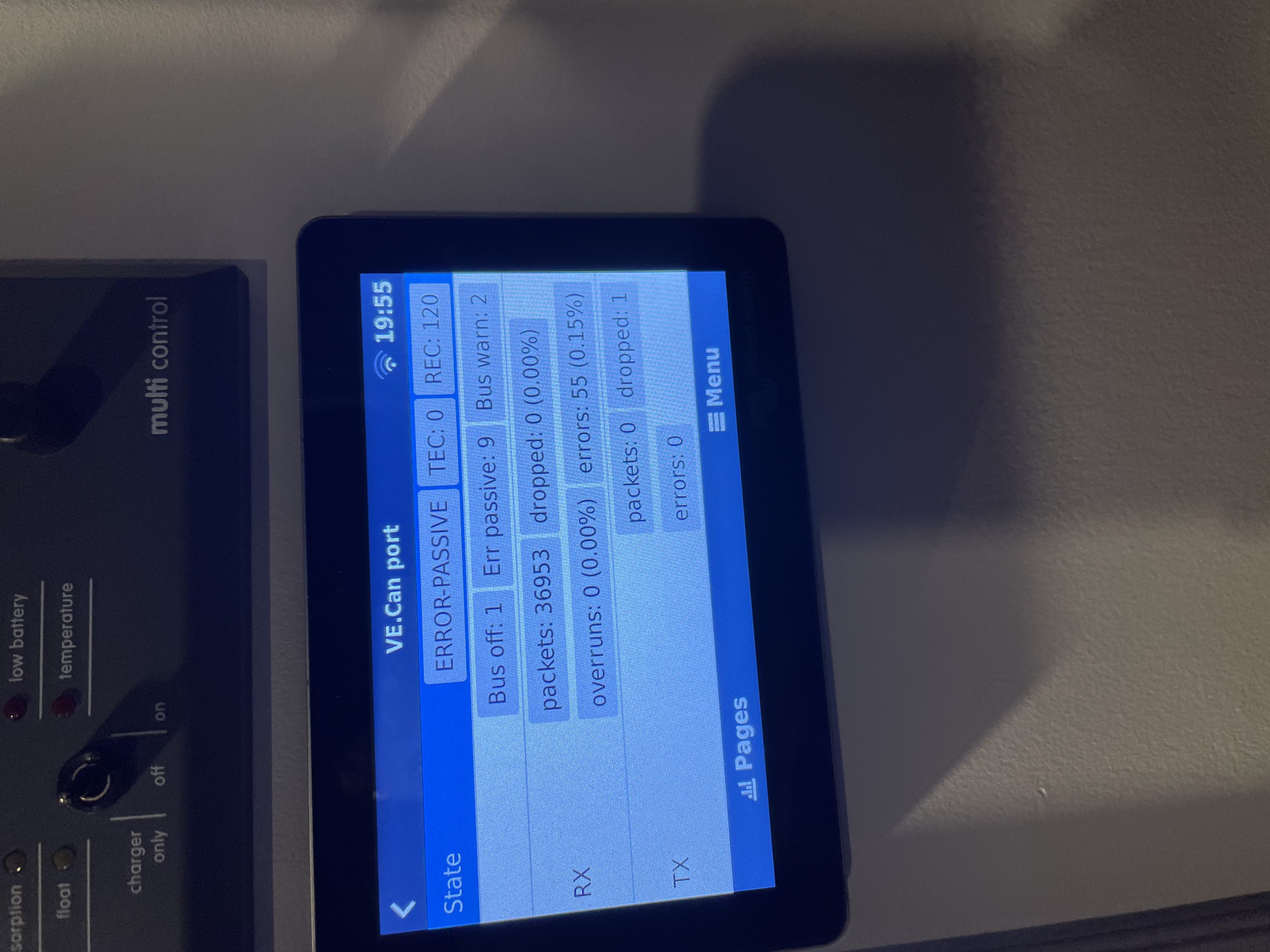
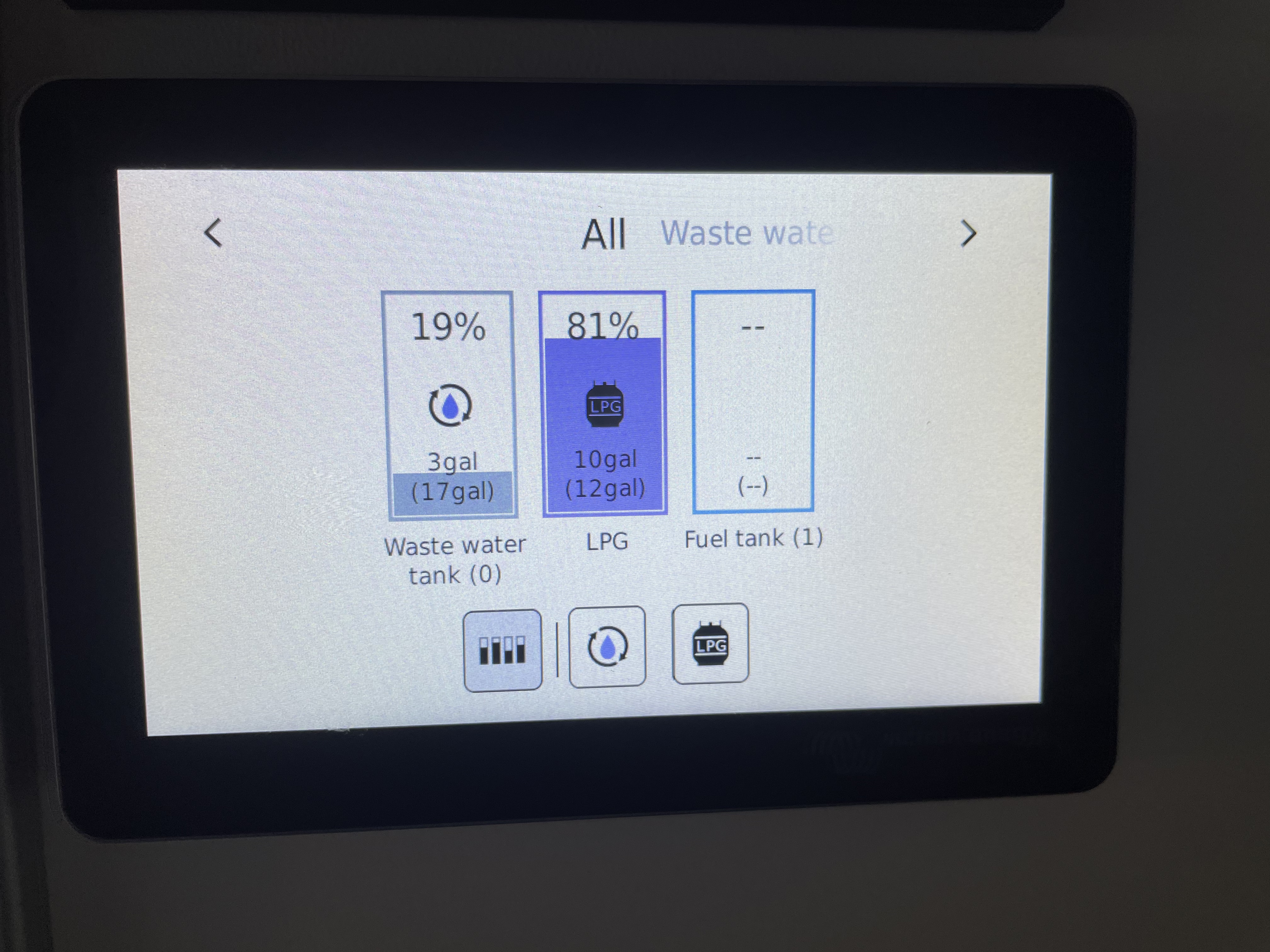
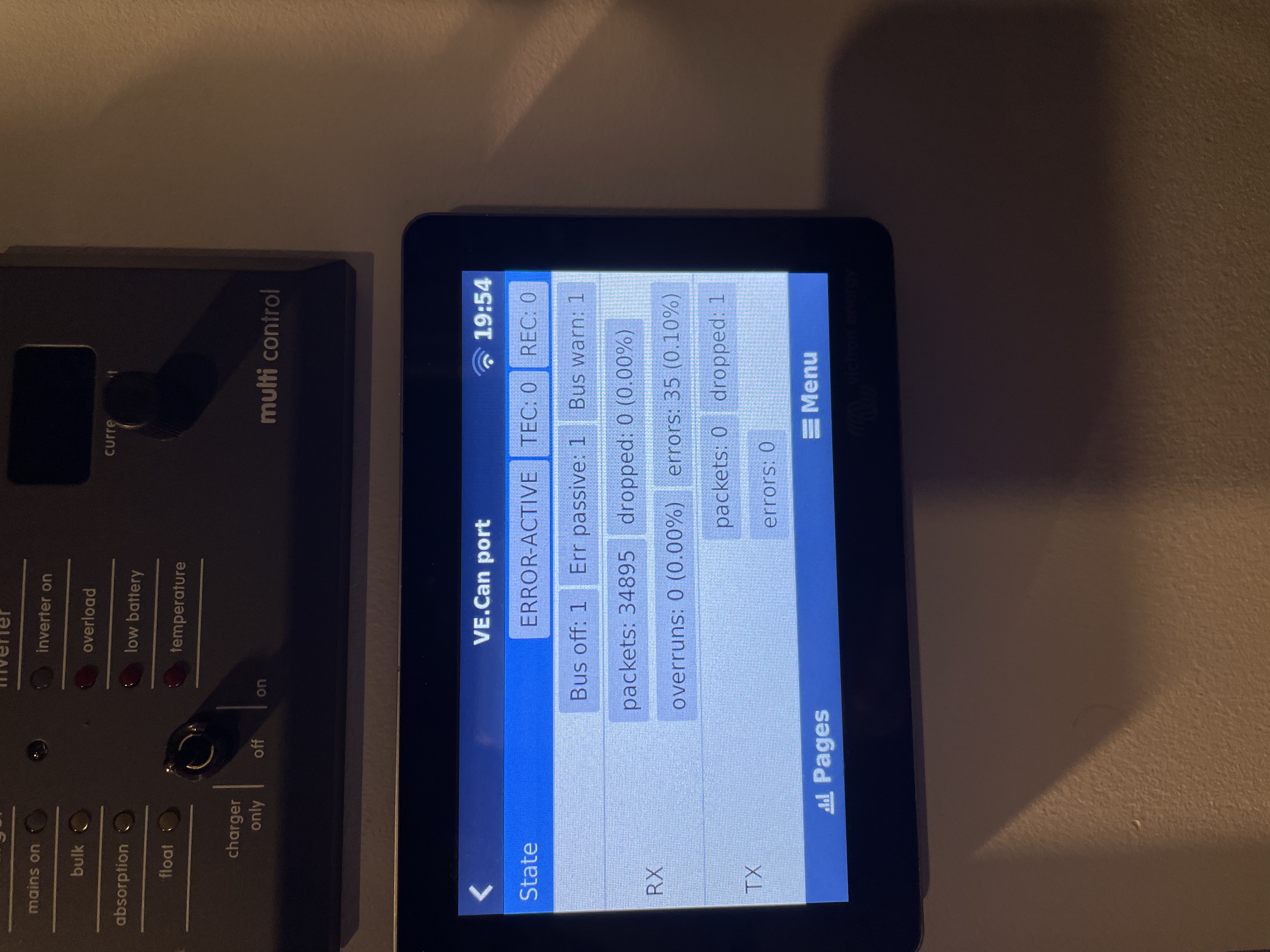 Hello, I followed the instructions above and the CERBO GX initially obtains the signal from the SeaLevel N2K for the water and grey water tanks but then loses the water tank reverting the display to “Fuel Tank” and then sometimes not showing it at all. I can repeat this issue by turning the power off and on to the N2K. Attached are screen shots of the CERBO VE Can port status showing errors. I’m not sure if the issue is with the N2K or CERBO. I’m grateful for any advice.
Hello, I followed the instructions above and the CERBO GX initially obtains the signal from the SeaLevel N2K for the water and grey water tanks but then loses the water tank reverting the display to “Fuel Tank” and then sometimes not showing it at all. I can repeat this issue by turning the power off and on to the N2K. Attached are screen shots of the CERBO VE Can port status showing errors. I’m not sure if the issue is with the N2K or CERBO. I’m grateful for any advice.